输入电压115-230VAC
电流0-5A
输出电压0-180VDC
适配电机直流电机
适用场合机械传动
材质不锈钢和铜
电机响应时间0.1秒
驱动器输出方式电压输出
驱动器电压24VDC
驱动器电流5A
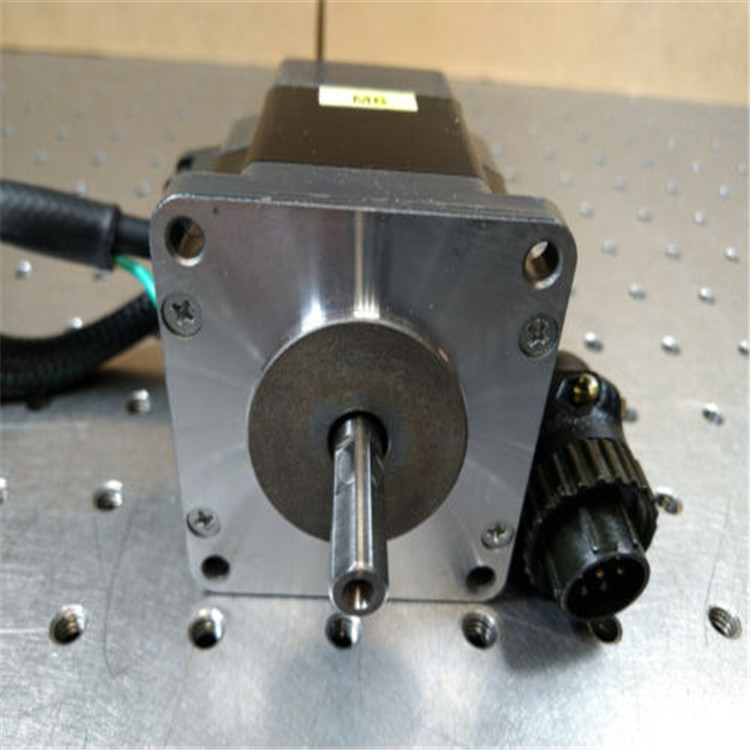
MYCOM步进电机通常电机的转子为永磁体,当电流流过定子绕组时,定子绕组产生一矢量磁场。该磁场会带动转子旋转一角度,使得转子的一对磁场方向与定子的磁场方向一致。当定子的矢量磁场旋转一个角度。转子也随着该磁场转一个角度。每输入一个电脉冲,电动机转动一个角度前进一步。它输出的角位移与输入的脉冲数成正比、转速与脉冲频率成正比。改变绕组通电的顺序,电机就会反转。所以可用控制脉冲数量、频率及电动机各相绕组的通电顺序来控制步进电机的转动。
SND103-220
IMS202-120F
PMS35L-02-050
PMC35L-02-050
PMS20-02-059-b
PMS26-02-059-b
UPS50-010
IMS51-010
UPS50-110
IMS51-110
UPS51-310
IMS51-210
UPS52-130
UPS53-330
UPS55-510
UPS502-0

智能控制不依赖或不完全依赖控制对象的数学模型 ,只按实际效果进行控制 , 在控制中有能力考虑系统的不确定性和性 , 突破了传统控制必须基于数学模型的框架 。目前 , 智能控制在步进电机系统中应用较为成熟的是模糊逻辑控制 、网络和智能控制的集成 。
模糊控制就是在被控制对象的模糊模型的基础上 ,运用模糊控制器的近似推理等手段 ,实现系统控制的方法 。作为一种直接模拟人类思维结果的控制方式 , 模糊控制已广泛应用于工业控制领域 。与常规控制相比 ,模糊控制无须的数学模型 , 具有较强的鲁棒性 、自适应性 , 因此适用于非线性 、时变 、时滞系统的控制 。文献[ 16] 给出了模糊控制在二相混合式步进电机速度控制中应用实例 。系统为超前角控制 ,设计无需数学模型 ,速度响应时间短 。
IMS500-020L-535EA(B)
IMS500-020L-543AC(BC)
IMS500-020L-544AC(BC)
IMS500-020L-545AC(BC)
IMS500-120L-564AC(BC)
IMS500-120L-566AC(BC)
IMS500-120L-569AC(BC)
PEE533-A
PF564-AC
PF566-AC
PF569-AC
IMS500-020L
IMS500-120L
PCE5431-BC
PCE5441-BC
PCE5451-BC
PCE5641-BC
PCE5661-BC
PCE5691-BC
PCE5961-BC
PCE5991-BC
PCE59131-BC
PCE5641-ACM
PCE5661-ACM
PCE5691-ACM
PCE5961-ACM
PCE5991-ACM
PCE59131-ACM
ISD500-020
ISD500-120
PEE533-A
PEE535-A
PCE5431-AC
PCE5441-AC
PCE5451-AC
PCE5641-AC
PCE5661-AC
PCE5691-AC
GTS500-020
GTS500-120

具有良好制动效能稳定(制动因数与摩擦系数成线性关系)性、在各种路面上都有良好的制动表现、结构简单维修方便等优点,在现代车辆和工程机械设备上得到了广泛的应用。在乘用车上的大多都是接触式摩擦制动器,它利用液体用力作为动力源,通过液力来推动摩擦片与制动盘相接触,使汽车减速或者停车。
时滞问题摩擦制动器在开始制动时,存在时滞问题,即从司机踩下制动路板之后到汽车开始减速存在着一段时间。磨损问题汽车在高速的工况下进行制动,摩擦块磨损加剧,而且由于温度升高还出现制动效能降低的现象。摩擦热摩擦制动器在工作中产生大量的摩擦热 可以使制动器的工作表面产生局部高温,表面氧化甚至热疲劳磨损终使摩擦制动器失效 所以研究温度对摩擦制动器性能的影响有重要意义。而摩擦制动器温度是一个很复杂的问题 涉及的学科面很广需要多学科综合运用特别是计算机,数学,物理,化学及材料学等学科的灵活运用 。
MLN20-210-464A(B)
MLN20-210-466A(B)
MLN20-210-468A(B)
PF464-02A(B)
PF466-02A(B)
PF468-02A(B)
MLN50-110
MLN50-120
MLN50-110-5641AC(BC)
MLN50-110-5661AC(BC)
MLN50-110-5691AC(BC)
MLN50-110-5961AC(BC)
MLN50-110-5991AC(BC)
MLN50-110-59131AC(BC)
MLN50-120-5641AC(BC)
MLN50-120-5661AC(BC)
五种标准化编程语言:顺序功能图(SFC)、梯形图(LD)、功能模块图(FBD)三种图形化语言和语句表(IL)、结构文本(ST)两种文本语言。选用的编程语言应遵守其标准(IEC6113123),同时,还应支持多种语言编程形式,如C,Basic等,以满足控制场合的控制要求。
可编程逻辑控制器的诊断功能包括硬件和软件的诊断。硬件诊断通过硬件的逻辑判断确定硬件的故障位置,软件诊断分内诊断和外诊断。通过软件对PLC内部的性能和功能进行诊断是内诊断,通过软件对可编程逻辑控制器的CPU与外部输入输出等部件信息交换功能进行诊断是外诊断。
可编程逻辑控制器的诊断功能的强弱,直接影响对操作和维护人员技术能力的要求,并影响平均维修时间。可编程逻辑控制器采用扫描方式工作。从实时性要求来看,处理速度应越快越好,如果信号持续时间小于扫描时间,则可编程逻辑控制器将扫描不到该信号,造成信号数据的丢失。
//www.ha0618.com