输入电压115-230VAC
电流0-5A
输出电压0-180VDC
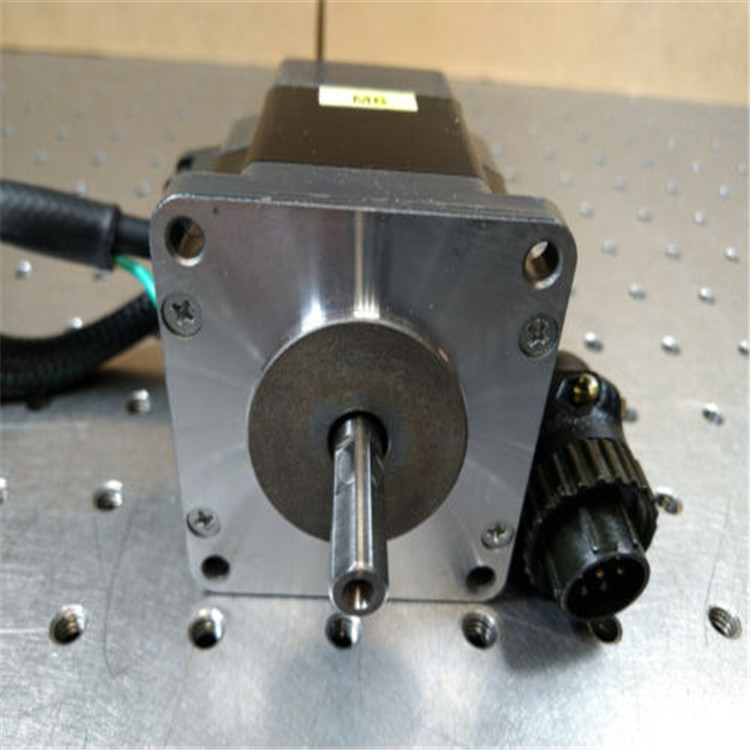
适配电机直流电机
适用场合机械传动
材质不锈钢和铜
电机响应时间0.1秒
驱动器输出方式电压输出
驱动器电压24VDC
驱动器电流5A
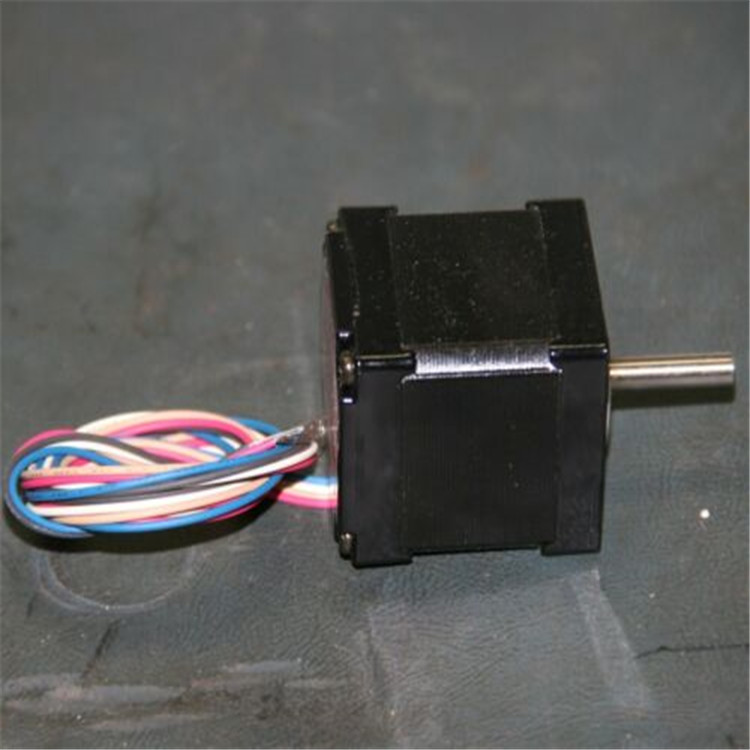
MYCOM步进电机的起动频率特性使步进电机启动时不能直接达到运行频率,而要有一个启动过程,即从一个低的转速逐渐升速到运行转速。停止时运行频率不能立即降为零,而要有一个高速逐渐降速到零的过程。
步进电机的输出力矩随着脉冲频率的上升而下降,启动频率越高,启动力矩就越小,带动负载的能力越差,启动时会造成失步,而在停止时又会发生过冲。要使步进电机快速的达到所要求的速度又不失步或过冲,其关键在于使加速过程中,加速度所要求的力矩既能充分利用各个运行频率下步进电机所提供的力矩,又不能超过这个力矩。因此,步进电机的运行一般要经过加速、匀速、减速三个阶段,要求加减速过程时间尽量的短,恒速时间尽量长。特别是在要求快速响应的工作中,从起点到终点运行的时间要求好短,这就必须要求加速、减速的过程好短,而恒速时的速度好高。
摩擦制动器是利用两个运动表面相互接触时所产生的摩擦阻力,将汽车运动时的动能和势能转化为热能,从而达到使汽车减速或停车的一种装置。摩擦制动器是使机械中的运动件停止或减速的机械零件。俗称刹车。利用两个运动表面相互接触时所产生的摩擦阻力,将汽车运动时的动能和势能转化为热能,从而达到使汽车减速或停车的一种装置。
摩擦制动器主要由制动架、制动件和操纵装置等组成。有些摩擦制动器还装有制动件间隙的自动调整装置。为了减小制动力矩和结构尺寸,摩擦制动器通常装在设备的高速轴上,但对安全性要求较高的大型设备(如矿井提升机、电梯等)则应装在靠近设备工作部分的低速轴上。有些制动器已标准化和系列化,并由工厂制造以供选用。
IMS21-220 (L)
IMS21-220-243A(B)
IMS21-220-244A(B)
IMS21-220-245A(B)
IMS21-220-264A(B)
IMS21-220-265A(B)
IMS21-220-268A(B)
PF245-A(B)
IMS21-220
MLN20-110
MLN20-210
MLN20-210-264A(B)
MLN20-210-265A(B)
MLN20-210-268A(B)
NSM50-6571
NSM50-6641
NSM50-6701
NSM50-6931
CBS50-010
CBS50-110
OSC-PCS28P15
OMC-PHR6P15
OMC-XHP6P15
OPC-X3P20
MR-300DS
MPR-100JWIN
MPR-100S
MPR-100S-D
MPV-100S
MPV-101S
MPV-100S-D
MPV-101S-D
ICD201-1120A

INS500-020-544AC(BC)
INS500-020-545AC(BC)
PF543-AC(BC)
PF544-AC(BC)
PF545-AC(BC)
INS500-120-5641AC(BC)
INS500-120-5661AC(BC)
INS500-120-5691AC(BC)
PCE59132-AC(BC)
INS20-010(L)
INS20-210(L)
INS20-210L-243A(B)
INS20-210L-244A(B)
INS20-210L-245A(B)
INS20-210L-264A(B)

INS500-120
INS500-020-533EA
INS500-020-535EA
INS500-020-543AC
ICD200-1120A
CMS-100
MMC-200
MMC-400
SNC-240
SNC-440
MNC-110
ECM-100
可编程逻辑控制器系统的通信网络中,上级的网络通信速率应大于1Mbps,通信负荷不大于60%。可编程逻辑控制器系统的通信网络主要形式有下列几种形式:PC为主站,多台同型号可编程逻辑控制器为从站,组成简易可编程逻辑控制器网络; 1台可编程逻辑控制器为主站,其他同型号可编程逻辑控制器为从站,构成主从式可编程逻辑控制器网络; 可编程逻辑控制器网络通过特定网络接口连接到大型DCS中作为DCS的子网; 可编程逻辑控制器网络(各厂商的可编程逻辑控制器通信网络)。 为减轻CPU通信任务,根据网络组成的实际需要,应选择具有不同通信功能的(如点对点、现场总线、)通信处理器。
//www.ha0618.com