输入电压115-230VAC
电流0-5A
输出电压0-180VDC
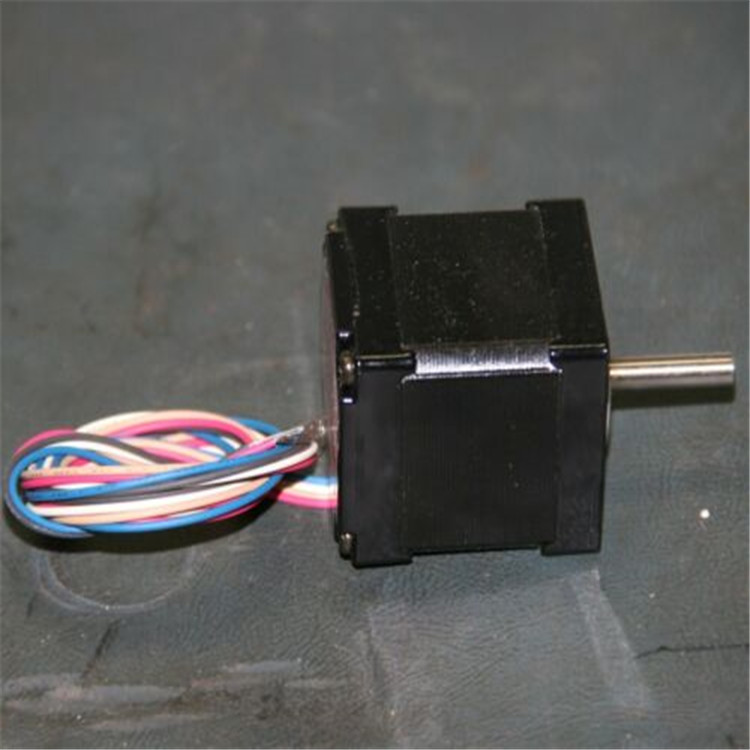
适配电机直流电机
适用场合机械传动
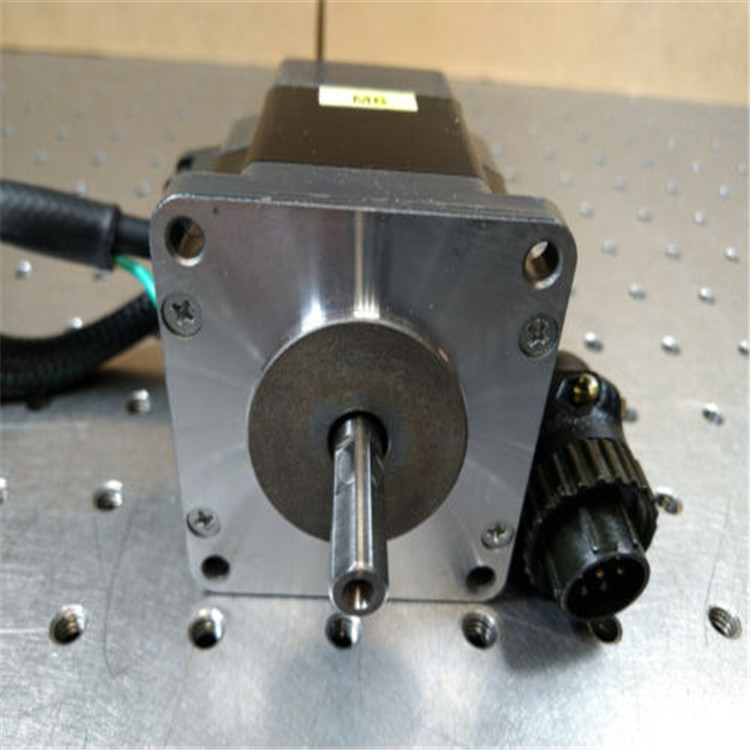
材质不锈钢和铜
电机响应时间0.1秒
驱动器输出方式电压输出
驱动器电压24VDC
驱动器电流5A
MYCOM驱动器细分驱动技术是年代中期发展起来的一种可以显著改善步进电机综合使用性能的驱动技术。年美国学者、在美国增量运动控制系统及器件年会上提出步进电机步距角细分的控制方法。在其后的二十多年里,步进电机细分驱动得到了很大的发展。逐步发展到上世纪九十年代完全成熟的。我国对细分驱动技术的研究,起步时间与国外相差无几。
具有良好制动效能稳定(制动因数与摩擦系数成线性关系)性、在各种路面上都有良好的制动表现、结构简单维修方便等优点,在现代车辆和工程机械设备上得到了广泛的应用。在乘用车上的大多都是接触式摩擦制动器,它利用液体用力作为动力源,通过液力来推动摩擦片与制动盘相接触,使汽车减速或者停车。
时滞问题摩擦制动器在开始制动时,存在时滞问题,即从司机踩下制动路板之后到汽车开始减速存在着一段时间。磨损问题汽车在高速的工况下进行制动,摩擦块磨损加剧,而且由于温度升高还出现制动效能降低的现象。摩擦热摩擦制动器在工作中产生大量的摩擦热 可以使制动器的工作表面产生局部高温,表面氧化甚至热疲劳磨损终使摩擦制动器失效 所以研究温度对摩擦制动器性能的影响有重要意义。而摩擦制动器温度是一个很复杂的问题 涉及的学科面很广需要多学科综合运用特别是计算机,数学,物理,化学及材料学等学科的灵活运用 。
MLN20-210-464A(B)
MLN20-210-466A(B)
MLN20-210-468A(B)
PF464-02A(B)
PF466-02A(B)
PF468-02A(B)
MLN50-110
MLN50-120
MLN50-110-5641AC(BC)
MLN50-110-5661AC(BC)
MLN50-110-5691AC(BC)
MLN50-110-5961AC(BC)
MLN50-110-5991AC(BC)
MLN50-110-59131AC(BC)
MLN50-120-5641AC(BC)
MLN50-120-5661AC(BC)

智能控制不依赖或不完全依赖控制对象的数学模型 ,只按实际效果进行控制 , 在控制中有能力考虑系统的不确定性和性 , 突破了传统控制必须基于数学模型的框架 。目前 , 智能控制在步进电机系统中应用较为成熟的是模糊逻辑控制 、网络和智能控制的集成 。
模糊控制就是在被控制对象的模糊模型的基础上 ,运用模糊控制器的近似推理等手段 ,实现系统控制的方法 。作为一种直接模拟人类思维结果的控制方式 , 模糊控制已广泛应用于工业控制领域 。与常规控制相比 ,模糊控制无须的数学模型 , 具有较强的鲁棒性 、自适应性 , 因此适用于非线性 、时变 、时滞系统的控制 。文献[ 16] 给出了模糊控制在二相混合式步进电机速度控制中应用实例 。系统为超前角控制 ,设计无需数学模型 ,速度响应时间短 。
IMS500-020L-535EA(B)
IMS500-020L-543AC(BC)
IMS500-020L-544AC(BC)
IMS500-020L-545AC(BC)
IMS500-120L-564AC(BC)
IMS500-120L-566AC(BC)
IMS500-120L-569AC(BC)
PEE533-A
PF564-AC
PF566-AC
PF569-AC
IMS500-020L
IMS500-120L
PCE5431-BC
PCE5441-BC
PCE5451-BC
PCE5641-BC
PCE5661-BC
PCE5691-BC
PCE5961-BC
PCE5991-BC
PCE59131-BC
PCE5641-ACM
PCE5661-ACM
PCE5691-ACM
PCE5961-ACM
PCE5991-ACM
PCE59131-ACM

INS500-120
INS500-020-533EA
INS500-020-535EA
INS500-020-543AC
ICD200-1120A
CMS-100
MMC-200
MMC-400
SNC-240
SNC-440
MNC-110
ECM-100

PF566-AC(BC)
PF569-AC(BC)
GTS500-120-5641AC(BC)
GTS500-120-5661AC(BC)
GTS500-120-5691AC(BC)
IMS50-110-5641AC(BC)
IMS50-110-5661AC(BC)
IMS50-110-5691AC(BC)
IMS50-110-5961AC(BC)
IMS50-110-5991AC(BC)
IMS50-110-59131AC(BC)
IMS50-210-5692AC(BC)
控制功能包括PID控制运算、前馈补偿控制运算、比值控制运算等,应根据控制要求确定。可编程逻辑控制器主要用于顺序逻辑控制,因此,大多数场合常采用单回路或多回路控制器解决模拟量的控制,有时也采用的智能输入输出单元完成所需的控制功能,提高可编程逻辑控制器的处理速度和节省存储器容量。例如采用PID控制单元、高速计数器、带速度补偿的模拟单元、ASC码转换单元等。
大中型可编程逻辑控制器系统应支持多种现场总线和标准通信协议(如TCP/IP),需要时应能与工厂管理网(TCP/IP)相连接。通信协议应符合ISO/IEEE通信标准,应是开放的通信网络。可编程逻辑控制器系统的通信接口应包括串行和并行通信接口、RIO通信口、常用DCS接口等;大中型可编程逻辑控制器通信总线(含接口设备和电缆)应1:1冗余配置,通信总线应符合国际标准,通信距离应满足装置实际要求。
//www.ha0618.com